
به گزارش قدس آنلاین و به نقل از وبسایت رسمی "دانشگاه ایالتی کارولینای شمالی"(NC State)، پژوهشگران با الهام از بیومکانیک "سفرهماهی دیو"(Manta ray)، یک ربات نرم کارآمد ابداع کردهاند که میتواند بیش از چهار برابر سریعتر از رباتهای نرم شناگری که پیشتر ابداع شدهاند، شنا کند. این رباتها، "رباتهای پروانهای" نامیده میشوند زیرا حرکت شنای آنها شبیه به حرکت بازوهای یک انسان هنگام شنای پروانه است.
"جی یین"(Jie Yin)، دانشیار مهندسی مکانیک و هوافضا در دانشگاه ایالتی کارولینای شمالی و از پژوهشگران این پروژه گفت: تا به امروز، رباتهای نرم شناگر قادر به شنا کردن سریعتر از یک "طول بدن در ثانیه"(BL/s) نبودهاند اما موجودات دریایی مانند سفرهماهی دیو میتوانند بسیار سریعتر و کارآمدتر شنا کنند. ما تصمیم گرفتیم از بیومکانیک این موجودات استفاده کنیم تا ببینیم که آیا میتوانیم رباتهای نرم سریعتر و کارآمدتری را بسازیم. نخستین نمونههایی که ما ابداع کردهایم، بسیار خوب کار میکنند.
پژوهشگران، دو نوع ربات پروانهای ساختند. یکی از آنها که به طور ویژه برای سرعت ساخته شده است، میتواند به سرعت میانگین ۳.۷۴ طول بدن در ثانیه برسد. دومین ربات به گونهای طراحی شده است که قابلیت مانور بالایی داشته باشد و چرخشهای تندی را به راست یا چپ انجام دهد. نخستین نمونه از این ربات توانست به سرعت ۱.۷ طول بدن در ثانیه دست یابد.
"ییندینگ چی"(Yinding Chi)، پژوهشگر ارشد این پروژه گفت: پژوهشگرانی که آیرودینامیک و بیومکانیک را مطالعه میکنند، "عدد استروهال"(Strouhal number) را برای ارزیابی کارآیی انرژی حیوانات در حال پرواز و شنا به کار میبرند. حداکثر راندمان زمانی اتفاق میافتد که حیوانی با عدد استروهال بین ۰.۲ تا ۰.۴ شنا یا پرواز کند. هر دو ربات پروانهای ما دارای اعداد استروهال در این محدوده بودند.
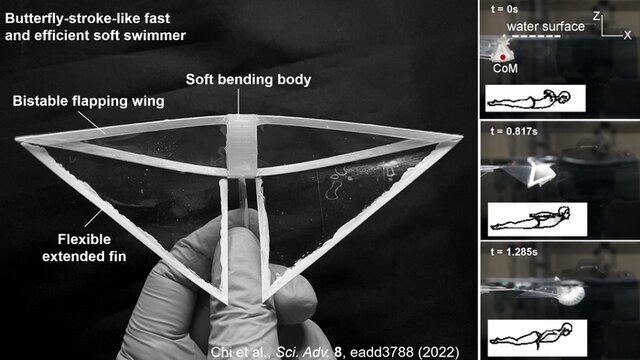
رباتهای پروانهای، قدرت شنا کردن را از بالهای خود میگیرند که "بایاستابل"(Bistable) هستند؛ به این معنی که بالها دو حالت پایدار دارند. بال آنها شبیه به گیره مو است. گیره مو تا زمانی که مقدار معینی انرژی را با خم کردن آن اعمال نکنید، پایدار است. هنگامی که مقدار انرژی به نقطه بحرانی میرسد، گیره مو به شکل دیگری در میآید که آن هم پایدار است.
در رباتهای پروانهای، بالهای بایاستابل الهام گرفته از گیره مو به بدنهای نرم و سیلیکونی متصل میشوند. کاربران، انتقال بین دو حالت پایدار در بالها را با پمپاژ هوا به داخل محفظههای درون بدنه نرم ربات کنترل میکنند. با پمپاژ هوا به داخل محفظهها، بدنه به بالا و پایین خم میشود و بالها را مجبور میکند تا همراه با آن به جلو و عقب بروند.
یین گفت: بیشتر تلاشهای پیشین برای توسعه رباتهای بالدار، بر استفاده از موتورها برای رساندن مستقیم انرژی به بالها متمرکز شدهاند. در روش ما، از بالهای بایاستابل استفاده میشود که با حرکت دادن بدنه مرکزی، به طور غیرفعال به حرکت در میآیند. این یک ویژگی مهم است زیرا امکان طراحی ساده را فراهم میکند و وزن ربات را کاهش میدهد.
این ربات پروانهای سریع، تنها یک واحد محرک دارد. واحد محرک، بدنه نرمی است که هر دو بال ربات را کنترل میکند. این باعث میشود که ربات بسیار سریع اما به سختی به چپ یا راست بپیچید. طراحی ویژه ربات، به کاربران امکان میدهد تا بالها را در هر دو طرف تنظیم کنند یا فقط یک بال را به حرکت درآورند تا امکان چرخشهای سریع فراهم شود.
یین افزود: این کار، یک اثبات مفهوم هیجانانگیز است اما محدودیتهایی دارد. واضحتر از همه این که نخستین نمونههای ربات، با لولههای باریک متصل میشوند. این همان روشی است که ما از آن برای پمپاژ کردن هوا به بدنههای مرکزی استفاده میکنیم. ما در حال حاضر مشغول ابداع یک نسخه مستقل هستیم.
این پژوهش، در مجله "Science Advances" به چاپ رسید.













نظر شما